研究概況 Research Introduction
目前無人機(unmanned aerial vehicle, UAV)廣泛應用在商業展演、貨物運輸、災害搜救、軍事偵察等用途。本組致力於研究無人機群的編隊控制系統,探討無人機在考慮到通訊、避障、環境等限制下的編隊控制設計,並進行軟、硬體迴路模擬與實機飛行來驗證研究成果。
Unmanned aerial vehicles (UAV) are widely used in commercial applications, cargo transportation, disaster rescue, military reconnaissance, and other purposes. This group is committed to developing the multi-UAV formation control system, which considering the restrictions of communication, obstacle avoidance, and environmental influence. We conducted software/hardware-in-the-loop simulation(SITL/HITL) and real aircraft flight to verify the feasibility of our controller design.
Unmanned aerial vehicles (UAV) are widely used in commercial applications, cargo transportation, disaster rescue, military reconnaissance, and other purposes. This group is committed to developing the multi-UAV formation control system, which considering the restrictions of communication, obstacle avoidance, and environmental influence. We conducted software/hardware-in-the-loop simulation(SITL/HITL) and real aircraft flight to verify the feasibility of our controller design.
近期研究 Recent Research
A distributed NMPC-based deformable formation tracking control framework of multi-UAV in obstacle environment
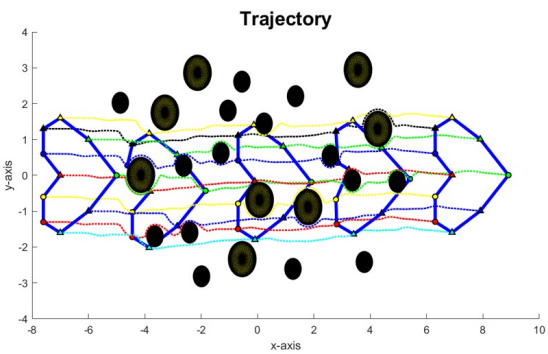
We aim to propose a novel deformable formation scheme that enables the system to autonomously adjust the formation for the current obstructive environment. Moreover, to generate a collision-free formation path in challenging environments, obstacle and collision avoidance approaches are also critical. Thus, we design a framework based on nonlinear model predictive control (NMPC) to fulfill the formation tracking control subject to obstacle constraints in this work.
There are three control objectives of our research, 1)., given a desired formation pattern set, find a suitable deformation strategy, so that the formation can adapt to the environments based on the given formation pattern set, 2)., maintain the rigidity of some desired formation through a distributed communication topology in real-time, 3)., guarantee collision-free paths for agents to fulfill reference trajectory tracking in the obstructive environment. Thus, we propose a novel leader-follower distributed nonlinear model predictive control (DNMPC) framework which enables the system to achieve formation tracking control in an environment with obstacles.
There are three control objectives of our research, 1)., given a desired formation pattern set, find a suitable deformation strategy, so that the formation can adapt to the environments based on the given formation pattern set, 2)., maintain the rigidity of some desired formation through a distributed communication topology in real-time, 3)., guarantee collision-free paths for agents to fulfill reference trajectory tracking in the obstructive environment. Thus, we propose a novel leader-follower distributed nonlinear model predictive control (DNMPC) framework which enables the system to achieve formation tracking control in an environment with obstacles.
Distributed Maneuver Control with Collision Avoidance for Second-Order
Multiple UAV System in Three-Dimensional Space
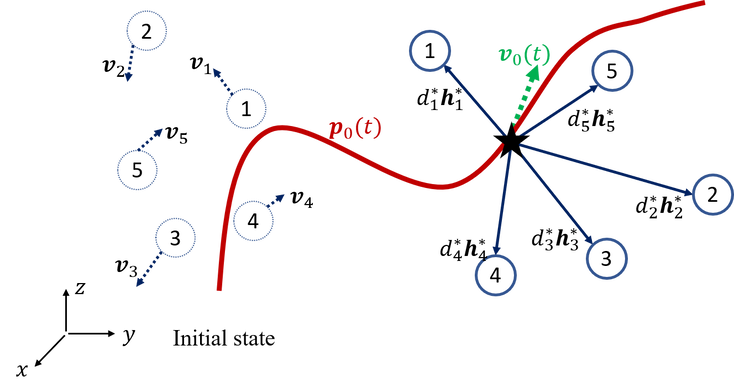
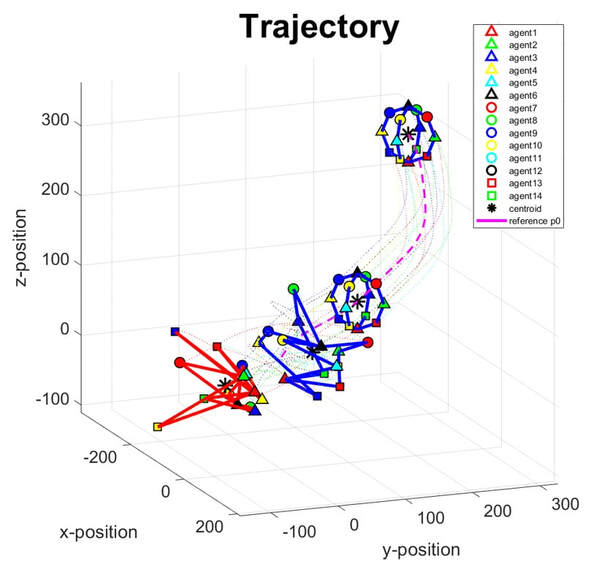
A formation and maneuver control of multi-agent systems in three-dimensional space has been considered in this research. The agents are controlled in a distributed manner with given communication links. Since our design mainly focuses on micro unmanned aerial vehicles (UAVs), a second-order integrator model is adopted to formulate the dynamics of each agent. The control objectives are to achieve the desired formation and fulfill the reference trajectory tracking while guaranteeing collision avoidance at any time. To this end, we adopt a multi-agent framework to address our problem. The agents only use information from their neighbors and keep the connectivity to maintain the communication while tracking the reference trajectory. Our collision avoidance algorithm is based on relative distance, relative velocity, and priority in the system. With such an algorithm, the computational burden of the onboard computer is reduced and makes sure a deadlock-free system. Besides this advantage of our approach, our formulation can even drive the agents to form a specific shape under a particular agent order. Finally, several simulation experiments have been conducted to verify the result of our algorithm.
Journal
- Yu-Wen Chen, Ming-Li Chiang, and Li-Chen Fu (2022, Jul) Three-Dimensional Maneuver Control of Multiagent Systems With Constrained Input, IEEE Transactions on Cybernetics. (SCI, Rank 1/63, automation and control)
- A. Pietrabissa, A. Di Giorgio, G. Oddi, G. Chini, M. L. Chiang, C. Poli, “Cooperative receding horizon strategies for the multivehicle routing problem,” Optimal Control Applications and Methods, 2017 (SCI)
- Cheng-Ming Huang, Ming-Li Chiang, and Tzu-Shun Hung, “Visual Servoing of a Micro Quadrotor Landing on a Ground Platform,” International Journal of Control, Automation and Systems, 2017 (SCI)
- Jen-te Yu and Li-Chen Fu, Fellow, IEEE “An Optimal Compensation Framework for Linear Quadratic Gaussian Control over Lossy Networks,” to appear in IEEE Transactions on Automatic Control, Nov 2015.
- Ming-Li Chiang and Li-Chen Fu, “Adaptive stabilization of a class of uncertain switched nonlinear systems with backstepping control,” Automatica, vol. 50, no.8, pp. 2128 -2135, Aug. 2014. (SCI)
- Ming-Li Chiang and Li-Chen Fu, “Robust output feedback stabilization of switched nonlinear systems with average dwell time,” Asian Journal of Control, vol. 16, no. 1, pp. 264-276, Mar. 2014. (SCI)
- Hsing-Cheng Yu, Bo-Syun Yu, Jen-te Yu, and Cheng-Kain Lin, “A Dual Notched Design of Radial-Flux Permanent Magnet Motors with Low Cogging Torque and Rare Earth Material,” IEEE Transactions on Magnetics, No. 11, Nov 2014.
- Jim-Wei Wu, Jyun-Jhih Chen, Ming-Li Chiang, Jen-te Yu, and Li-Chen Fu, Fellow, IEEE “Design and Control of Phase-Detection Mode Atomic Force Microscopy for Reconstruction of Cell Contours in Three-Dimensions,” IEEE TRANSACTIONS ON NANOTECHNOLOGY, VOL. 13, NO. 4, JULY, 2014.
- Cheng-Kai Lin, Tian-Hua Liu, Jen-te Yu, Li-Chen Fu, and Chieh-Fu Hsiao “Model-Free Predictive Current Control for Interior Permanent Magnet Synchronous Motor Drives Based on Current Difference Detection Technique,” IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 61, NO. 2, FEBRUARY 2014.
- Jen-te Yu, “A New Adaptive Backstepping Coulomb Friction Compensator for Servo Control Systems,” ASIAN JOURNAL OF CONTROL, VOL. 11, NO. 1, pp. 1-10, JANUARY 2009.
- Jen-te Yu, “A Convergent Algorithm for Computing Stabilizing Static Output Feedback Gains,” IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 49, NO. 12, DECEMBER 2004.
- Jen-te Yu, “A new static output feedback approach to the suboptimal mixed H2/H∞ problem,” INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROL 2004; 14:1023–1034.
- Jen-te Yu and Jie Chang, “A New Adaptive Backstepping Control Algorithm for Motion Control Systems - an Implicit and Symbolic Computation Approach,” INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING 2003; 17:19–32.
Conference
- Yu-Wen Chen, Ming-Li Chiang, Li-Chen Fu (2023, Jul). Adaptive Formation Control for Multiple Quadrotors with Nonlinear Uncertainties Using Lipschitz Neural Network. World Congress of IFAC (IFAC-WC 2023), Yokohama, Japan.
- K. -Y. Su, M. -L. Chiang, C. -W. Chen, L. -C. Fu. Three-Dimensional Distributed Maneuver Control of Multi-Agent Systems with Double Integrator Model. Chinese Automatic Control Society (CACS) International Automatic Control Conference, 2021.
- C. -W. Chen, M. -L. Chiang, K. -Y. Su, Y. -W. Chen and L. -C. Fu, "Distributed adaptive formation control of Multi-Agent Systems in three-dimensional space," 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), 2021, pp. 2126-2131, doi: 10.1109/CASE49439.2021.9551547.
- CHEN, Yu-Wen; CHIANG, Ming-Li; FU, Li-Chen. Formation Control with Orientation Alignment and Constrained Input. IFAC-PapersOnLine, 2020, 53.2: 3397-3402.
- HUANG, Yen Cheng, et al. Dual Null-Space Based Controller Design with Signal Compensation for Formation with Conflicted Tasks. In: 2019 IEEE Conference on Control Technology and Applications (CCTA). IEEE, 2019. p. 958-963.
- Y. Chen, M. Chiang and L. Fu, "Ordered formation control and affine transformation of Multi-Agent Systems without global reference frame," 2019 American Control Conference (ACC), 2019, pp. 45-50, doi: 10.23919/ACC.2019.8814449.
- M. Chiang, A. Liu and L. Fu, "Reinforcement Learning Control for Consensus of the Leader-Follower Multi-Agent Systems," 2018 IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), 2018, pp. 1152-1157, doi: 10.1109/DDCLS.2018.8516035.
- Ming-Li Chiang and Cheng-Ming Huang, and Li-Chen Fu, “An internal model based observer for nonlinear output regulation,” in Proc. CACS International Automatic Control Conference, Nov. 2016.
- Ming-Li Chiang and Alberto Isidori, “Nonlinear output regulation with saturated control for a class of non-minimum phase systems,” IEEE Conference on Decision and Control, Dec. 2015.
- Jim-Wei Wu, Yu-Ting Lo, Wei-Chih Liu, and Li-Chen Fu, "Lissajous Scan Trajectory with Internal Model Principle Controller for Fast AFM Image Scanning," Proc. of the SICE Annual Conference, Hangzhou, China, July 28-30, 2015.
- Yi-Ting Lin, Yu-Ting Lo, Jim-Wei Wu, Wei-Chih Liu, and Li-Chen Fu, "A Dual Probes AFM System with Effective Tilting Angles to Achieve High-Precision Scanning," Proc. of 53st IEEE Conference on Decision and Control, Los Angeles, California, Dec. 15-17, 2014.
- Ming-Li Chiang and Li-Chen Fu, “Adaptive state feedback stabilization of uncertain switched nonlinear systems consisting of feedback linearizable non-switching dynamics,” IEEE Conference on Decision and Control, Dec. 2013.
- Cheng-Ming Huang, Ming-Li Chiang, and Li-Chen Fu, “Adaptive visual servoing of micro aerial vehicle with switched system model for obstacle avoidance,” IEEE International Conference on Systems, Man, and Cybernetics, Oct. 2013.
- Chih-Lieh Chen, Jim-Wei Wu, Yi-Ting Li, and Li-Chen Fu, "Precision Sinusoidal Local Scan for Large Range Atomic Force Microscopy with Auxiliary Optical Microscopy," Proc. of 52st IEEE Conference on Decision and Control, Florence, Italy, Dec. 10-13, 2013.
- Ming-Li Chiang and Li-Chen Fu, “Robust stabilization of a class of unknown switched nonlinear systems,” in Proc. CACS International Automatic Control Conference, Nov. 2012. (BEST PAPER AWARD)
- Jim-Wei Wu, Jyun-Jhih Chen, Kuan-Chia Huang, Chih-Lieh Chen, Yi-Ting Lin, Mei-Yung Chen, and Li-Chen Fu, "Design and Control of Phase-Detection Mode Atomic Force Microscopy for Cells Precision Contour Reconstruction under Different Environments," Proc. of American Control Conference, Washington DC, USA, June 17-19, 2013.
- Ming-Li Chiang and Li-Chen Fu, “Average dwell time condition of unknown switched linear systems with variable structure adaptive backstepping control,” in Proc. American Control Conference, 2012.
- Kuan-Chia Huang, Jim-Wei Wu, Jyun-Jhih Chen, Chih-Lieh Chen, Mei-Yung Chen, and Li-Chen Fu, "Development of a Large Scanning-range Atomic Force Microscope with Adaptive Complementary Sliding Mode Controller,"Proc. of 51st IEEE Conference on Decision and Control, Hawaii, USA, Dec. 10-13, 2012.
- Jim Wei Wu, Yuan-Zhi Peng, Jyun-Jhih Chen, Kuan-Chia Huang, Mei-Yung Chen, Li-Chen Fu, "Design and Implementation of a Large Measurement-range AFM Scanning System," Proc. of American Control Conference, Montreal, Canada, June 27-29, 2012.
- Ming-Li Chiang and Li-Chen Fu, “Variable structure based adaptive control with tuning function design for a class of unknown switched linear systems,” in Proc. IFAC, 2011.
- Yuan-Zhi Peng, Jim-Wei Wu, Kuan-Chia Huang, Jyun-Jhih Chen, Mei-Yung Chen, and Li-Chen Fu, "Design and Implementation of an Atomic Force Microscope with Adaptive Sliding Mode Controller for Large Image Scanning," Proc. of 50th IEEE Conference on Decision and Control, Orlando, Florida, USA, December 12-15, 2011.
- Jim-Wei Wu, Mei-Yung Chen, Shao-Kang Hung, Li-Chen Fu, "A Compact Tapping Mode AFM with Sliding Mode Controller for Precision Image Scanning," Proc. of 8th Asian Control Conference, Kaohsiung, Taiwan, May 15-18, 2011.
- Kuan-Lin Huang, Yuan-Zhi Peng, Jim-Wei Wu, Mei-Yung Chen, and Li-Chen Fu, "Design and Implementation of an Electromagnetically Damped Positioner with Flexure Suspension," Proc. of IEEE Multi-Conference on Systems and Control, Denver, USA, September 28-30, 2011.
- Shan-Tsung Lee, Kuan-Lin Huang, Jim-Wei Wu, and Li-Chen Fu, "Design and Control of Long Travel Range Electromagnetically Actuated Positioning Stage with Application to Precise Machining," Proc. of IEEE Multi-Conference on Systems and Control, pp.2219-2224, Yokohama, Japan, September, 8-10, 2010.
- Shih-Hsun Yen, Jim-Wei Wu, and Li-Chen Fu, "Apply Tapping Mode Atomic Force Microscope with CD/DVD Pickup Head in Fluid," Proc. of American Control Conference, pp. 6549-6554, Baltimore, MD, U.S.A., June 30-July 2, 2010.
